(You can read this post in English here)
Enquanto pesquisava para o post anterior, acabei tropeçando neste artigo no Knowledge Center da Yaskawa, que fala sobre o método mais comum utilizado pela grande maioria dos profissionais da área: editar programas e arquivos de configuração de robôs utilizando editores de texto universais.
Eu nem gosto tanto assim do VS Code, mas tenho que admitir que o ecossistema de extensões dele é muito bom, incluindo essa aqui, mencionada no artigo.
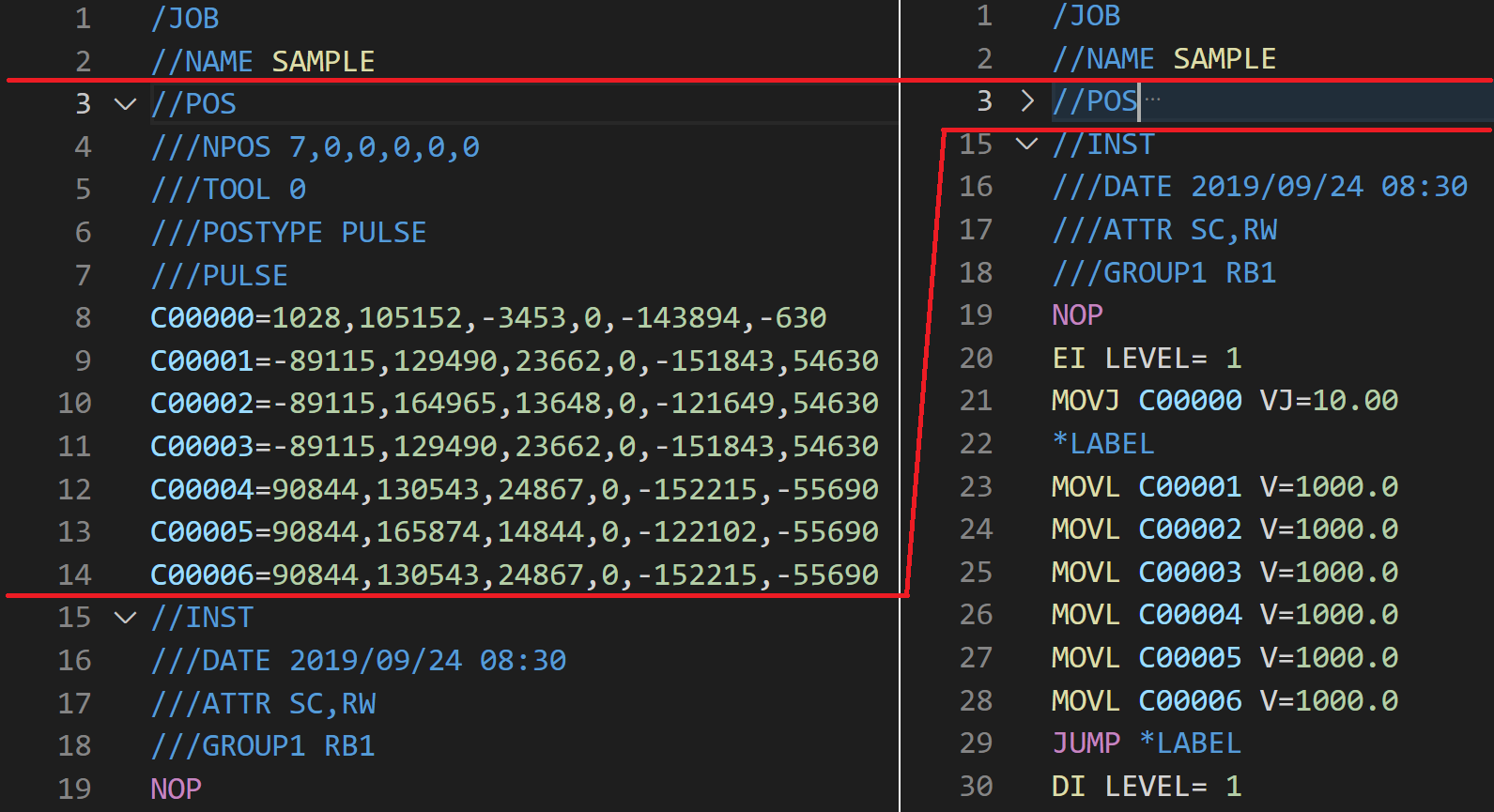
Mais do que a edição dos jobs propriamente ditos, o que realmente me chamou a atenção foram os recursos para edição de arquivos de parâmetros. Ao passar o mouse sobre um espaço em um arquivo de parâmetros, a extensão mostra um pequeno "hint" com endereço daquele espaço, seja o arquivo ALL.PRM, seja no IONAME.DAT.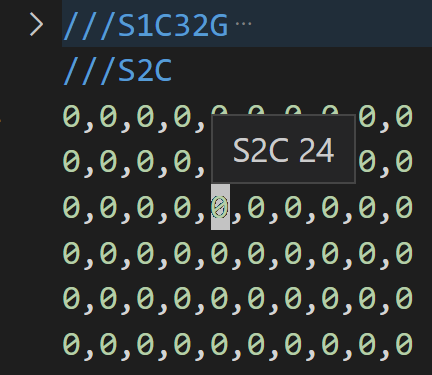
Outro recurso bacana é a extensão "congela" o cabeçalho da sessão do arquivo, à medida em que o usuário vai rolando a tela. Muito útil na hora de preencher arquivos que estão totalmente vazios.

Parabéns ao desenvolvedor!